3D tarayıcı nedir? 3D tarayıcı nasıl çalışır? 3D tarayıcı çeşitleri nelerdir? 3D tarayıcı fiyatları ülkemizde ne durumdadır? 3D tarayıcı hizmeti nedir?
Bir 3D model oluşturmak amacıyla nesneleri taramanın veya bir manzaranın 3D bilgilerini kaydetmenin birkaç farklı yöntemi vardır. Farklı ihtiyaçlara yönelik en iyi çözümü sağlamak adına farklı her metod kendine özgü tarama sonuçları verir.
Tüketici kullanımı için en popüler tarayıcı türü, 3D lazer tarayıcıdır. Lazer tarama, bir nesnenin yüzeyinde bir nokta bulutu oluşturmak için iki bilgi kümesini birleştirir: Nesne üzerinde parıldayan bir lazerden gelen veriler ve başka bir sensörden (tipik olarak hareket eden bir kamera veya iki sabit kamera) gelen verilerdir. 3D tarama yazılımı, bir modelin noktalarını oluşturmak için kameranın konumu ile lazer kaynağı arasındaki bilinen mesafeyi kullanarak bu veri kümelerini birbirine bağlar. Bir lazer taramasından 3D geometri oluşturmak, tarama sırasında kamera tarafından yakalanan görüntülerde lazer çizgisinin nereye düştüğünün tespit edilmesini gerektirir. Lazer çizgisi genellikle bir görüntünün en parlak pikselidir, ancak bazen yakalanan başka ışık kaynakları da olabilir. Sabit bir tarayıcı, lazeri açıp kapatarak lazer çizgisini diğer her şeyden ayırt edebilir ve tarama sırasında yakalanan diğer ışıklar ile lazer çizgisi arasında izlenebilir bir fark yaratabilir.
Bir 3D tarama sırasında binlerce bireysel nokta yakalanır. Sıradan bir kamera gibi, bir lazer tarayıcı da yalnızca kendi görüş alanında olanı yakalayabilir. Yakalanan noktalar, yüzey ayrıntısı ve dokudan renge kadar her şeyi kaydederek taranan nesnenin doğrudan bir temsilini oluşturur. Yakalanan dijital objenin noktalar bulutu, noktaları yüzeylere dönüştürene kadar watertight bir dijital nesne değildir. Meshing işlemi, noktaları yüzeylerde birleştirmek için birbirleriyle nasıl ilişkili olduğunu hesaplar. Prosumer ölçekte bir masaüstü 3D tarayıcı örneği olarak Matter and Form 3D Tarayıcı V2 verilebilir. 3D tarayıcı fiyatlarını metatechtr.com web adresimizi ziyaret ederek öğrenebilirsiniz.

Stereo vision, uygun maliyetli, ancak tipik olarak daha düşük kaliteli bir 3D yakalama yöntemidir. Bir kameranın ötesinde lazer, projektör veya ekstra donanım gerektirmez. Stereo Vision, iki kamera konumundan bir nesnenin görüntülerini kullanarak insan gözünün stereo görüşünü taklit eden bir 3D model oluşturur. Bu işlem sırasında aynı sahnenin iki farklı açıdan görüntüleri çekilir. Görüntüler daha sonra herhangi bir lens bozulmasını gidermek için düzeltilir, böylece bir sahnedeki düz çizgiler görüntüde düz görünür. Ardından, nesnelerin kenarlarını bulan görüntüye bir filtre uygulanır. Pikseller daha sonra 3D derinlik üretmek için iki görüntü seti arasında eşleştirilir. Görüntüler arasındaki eşleştirme noktaları, bir sahnedeki yüzeyler yeterince yüksek kontrast olmadığında veya çok fazla benzer olduğunda sorunlara neden olabilecek kenarları ve ayırt edici özellikleri bulmak için doku varyasyonuna dayanır.
Photogrammetry, normal stereo vision rutinine daha fazla kamera konumu ekleyerek onu daha güçlü bir 3D sayısallaştırıcı haline getirir. Genellikle photogrammetry, tarama nesnesini çevreleyen çok sayıda kameradan oluşan büyük bir donanım içerir. Bir kamera teçhizatı çok hassas bir şekilde kalibre edilebilir ve uzun bir süre öyle kalabilir, bu da kurulum içinde 3D geometri oluşturmak için gereken nokta eşleştirmeyi çok tutarlı hale getirir. Farklı kamera konumları belirlemek için videonun tek tek karelerini seçerek, bir videonun karelerine photogrammetry uygulamak da mümkündür. Bu yöntem hataya daha yatkındır ve daha az tutarlı sonuçlar verir, ancak akıllı telefon uygulamalarına dahil edilmesindeki son artışın gösterdiği gibi, daha erişilebilir ve tutarlılığı doğru uygulamalara uyarlanabilir. Stereo görüş ve photogrammetry teknikleri robotikte, üç boyutlu bina haritalamasında ve 3D filmlerde kullanılır.
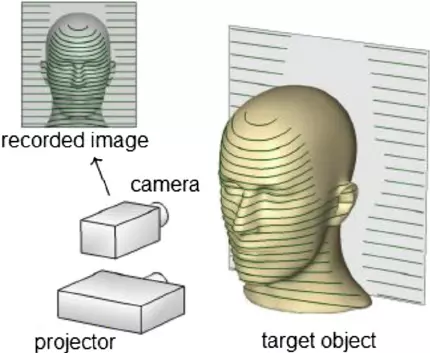
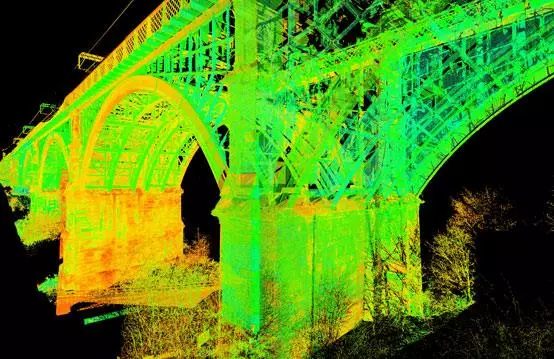
Yapılandırılmış ışık taraması, iyi bir 3D tarama elde etmek için doku değişimine bağlı değildir. Bu yöntemde, stereo görüntü ve lazer taramada kullanılan kamera konumlarından biri, bir nesnenin yüzeyine farklı ışık desenleri yansıtan (kendi dokusunu sağlayan) ve nesnenin bu desenleri nasıl bozduğunu kaydeden bir projektör ile değiştirilir. Model noktaları, bilinen kamera konumu ve nesneye çarpan ışık deseninden gelen bilgiler kullanılarak oluşturulur. Etkili olabilmek için projektör ile kameranın pikselleri arasında kesin bire bir ilişki olması gerekir. Yapılandırılmış ışık taraması, yüz tanıma teknolojisi, tersine mühendislik, tasarım, imalat ve uzaktan çevre tanımada kullanılır (deniz tabanının haritalanması ve demiryolu tünellerinin incelenmesi).
Nesne tarama zamanı veya lazer darbesi taraması, bir lazer ışınının nesneye ulaşmasının ve lazerin kaynağına geri dönmesinin ne kadar sürdüğünü zamanlayarak bir 3D model taraması üretir. Işık hızının bilinen değeri, bu mesafe hesaplama yöntemini mümkün kılan şeydir. Teknik, genellikle menzil görüntüleme kamera sistemlerinde veya 3D kameralarda kullanılır. Tarama süresi teknolojisi, kalite açısından oldukça karmaşıktır, ancak genellikle büyük ortamları ve binaları taramak için ayrıldığında pahalı bir seçenek olabilir.
Bambu Lab H2C 3D yazıcı hangi yeniliklerle gelecek? Kullanıcılar mevcut cihazlarını yükseltebilecek mi? Bu blog yazısında Bambu Lab’ın karar sürecinden teknik çözümlerine ve H2C’nin getirdiği yeniliklere kadar tüm ayrıntılara değineceğiz.
En büyük üretim hacmini, benzeri görülmemiş hızı ve profesyonel düzeyde hassasiyeti sunan amiral gemisi kişisel üretim merkezi olan Bambu Lab H2S duyuruldu.
3D yazıcı teknolojisi, son yıllarda hızla gelişen ve birçok sektörde kullanılan bir teknoloji haline geldi. Bu teknoloji, üç boyutlu nesneleri katman katman oluşturarak, dijital tasarımları fiziksel ürünlere dönüştürme yeteneğine sahip. Bu teknoloji, prototip oluşturma, özelleştirilmiş üretim ve hatta evde hobi olarak kullanılabiliyor. Ancak, 3D yazıcıların en heyecan verici yönlerinden biri, onları bir gelir kaynağı olarak kullanma potansiyeli. Evet, doğru duydunuz. 3D yazıcı ile para kazanmak mümkün.
Bambu Lab , bir süredir söylentilerini işittiğimiz en yeni modeli Bambu Lab H2D ’yi nihayet tanıttı. Üstelik sadece söylentiler doğru çıkmakla kalmadı, ama aynı zamanda aklımıza bile gelmeyen yepyeni özellikler de duyuruldu.
Ön sipariş ürünlerimizin teslimat süreçleri ve bize göndereceğiniz ürünlerin paketlemeleri ile ilgili önemli açıklamaları bu yazımızda bulabilirsiniz.
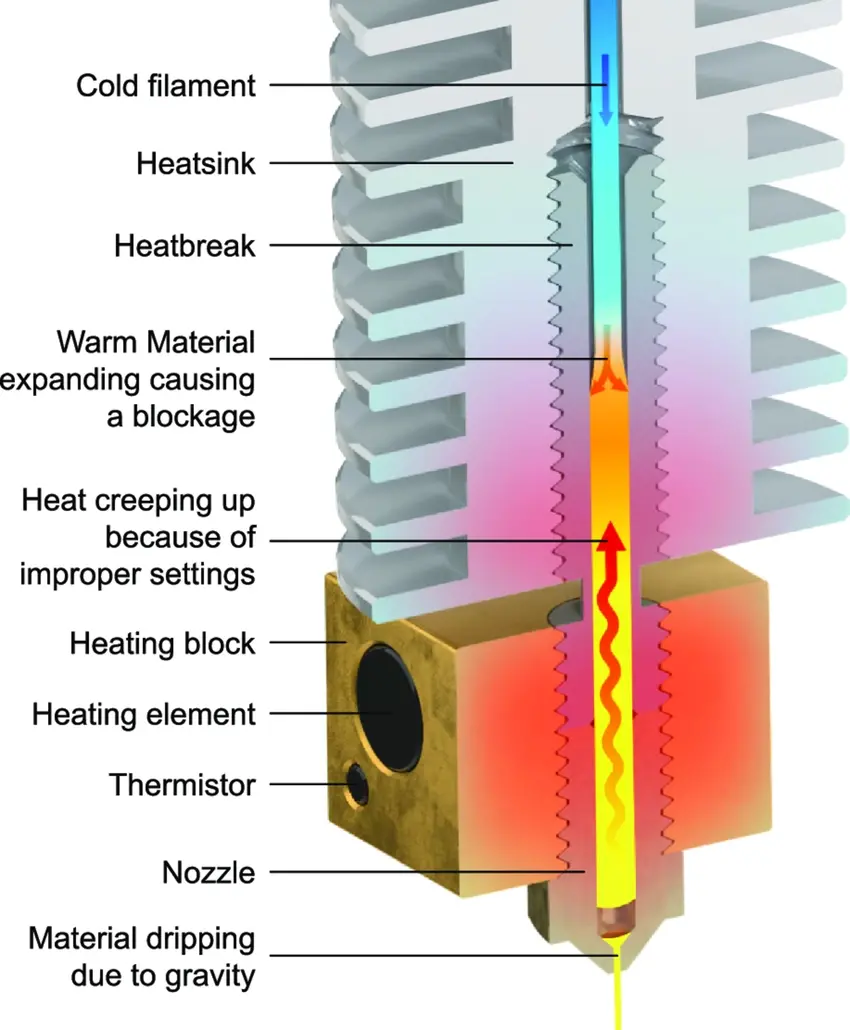
Sevgili MetatechTR ailesi, Havalar ısınmaya başladı ve biliyoruz ki bu mevsimde baskı almayı ayrı seviyorsunuz. Havalar ısındıkça 3D yazıcınızın sorunsuz çalışmaya devam etmesi için bazı önlemler almak önemlidir. Yüksek sıcaklıklar ve nem seviyeleri, baskı kalitesini etkileyebilir, heat creep (filament şişmesi) ve filament tıkanması gibi sorunlara yol açabilir. Bu blog yazımızda, yaz aylarında 3D yazıcınızı korumak için en etkili yöntemleri inceleyeceğiz. Hepinize faydalı olması dileğiyle.
BambuLab A1 Mini'ye Giriş BambuLab A1 Mini, 3D yazıcı dünyasında, özellikle küçük ve hızlı yazıcıları tercih eden kullanıcılar için ideal bir tercihtir. Bu model, kullanışlı boyutları ve etkileyici özellikleriyle öne çıkıyor. Türkiye distribütörü MetaTechTR üzerinden BambuLab A1 Mini'yi buradan satın alabilirsiniz .
Bambu Lab'ın Yeni X1E'si Profesyonellere Yönelik. Bambu lab X1E, Bambu lab X1 carbon combo.